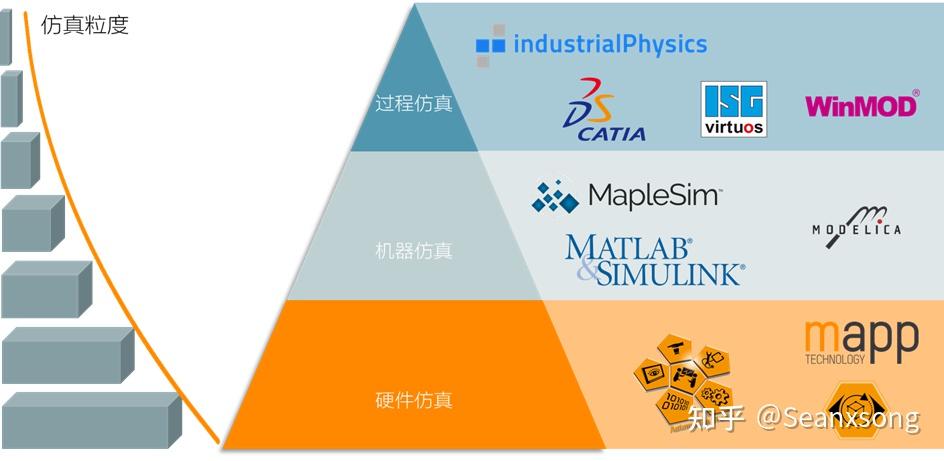
图2列举了建模仿真的作用与好处,它可以加速产品开发的过程、提升产品研发的品质、降低物理测试验证成本、并可以通过封装形成知识复用(基于CBD思想的软件开发)、更为直观的三维呈现。 协同仿真-多领域耦合系统开发
贝加莱,一直致力于机电装备的智能化应用开发,早在2008年贝加莱与Mathworks合作开发了Automation Studio Target for Simulink的接口。这使得MATLAB®/Simulink®和Automation Studio仿真和开发工具之间形成了快速的连接。在Simulink中经过测试的模型可以通过自动代码生成(Automatic Code Generation),生成的C、C++和结构文本(IEC 61131-3中指定的)代码,可以直接导入到贝加莱Automation Studio中,并实现硬件在环测试(Hardware In the Loop)。
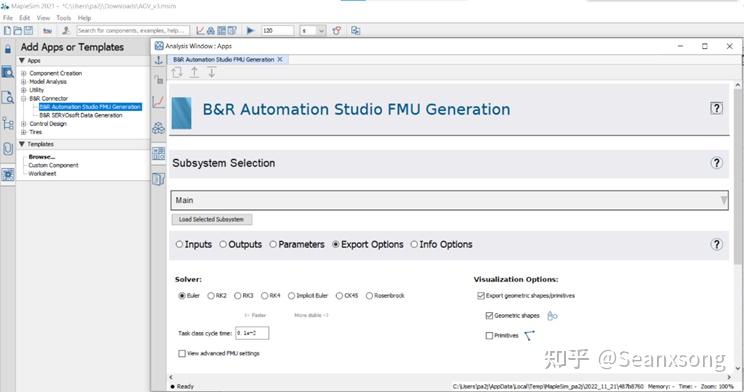
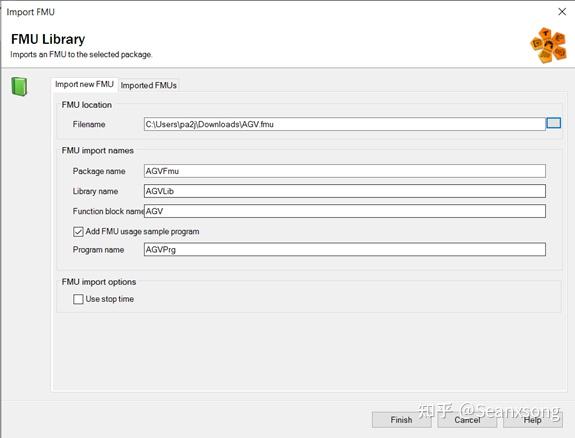
之后,贝加莱又与MapleSoft合作,该公司的MapleSim可以创建机器的高精度动态模型,它基于STEP格式的CAD数据。由于所有力和扭矩都经过精确建模,因此该模型可以用作组件设计的数字孪生。MapleSim的模型可以被导入到Automation Studio与控制任务耦合,形成快速的协同仿真,以及快速原型设计。



 发表于 2023-1-18 12:30:59
发表于 2023-1-18 12:30:59